文件大小:4.67M
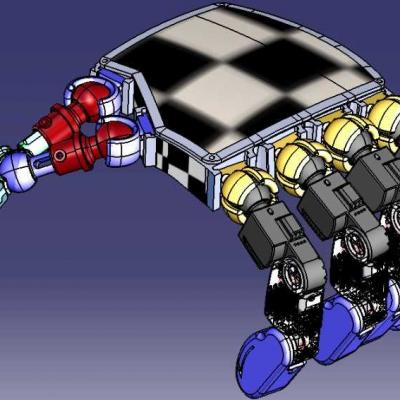
机器人手掌假肢3D模型,使用CATIA V5 R21设计,提供CATIA源文件分享,欢迎下载。
基本上可以通过机械假肢,来模拟人手的功能,虽然没有目前人手的灵活

机器人手掌假肢3D模型,使用CATIA V5 R21设计,提供CATIA源文件分享,欢迎下载。
基本上可以通过机械假肢,来模拟人手的功能,虽然没有目前人手的灵活
27下载215浏览37.8M

71下载229浏览23.8M
96下载328浏览1.59M
71下载317浏览1.44M
43下载345浏览16.7M
78下载271浏览3.94M

65下载335浏览15.6M
48下载316浏览4.51M
36下载277浏览258.93K

88下载435浏览20.3M