文件大小:8.22M
目的・动作
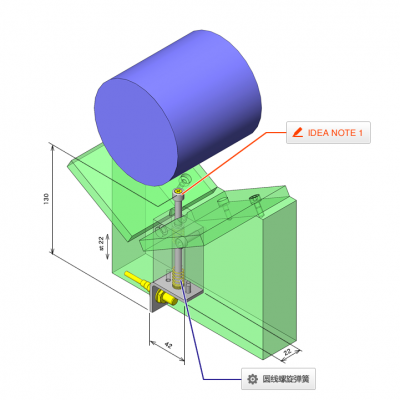
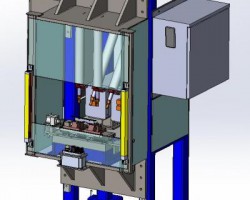
在V形工件支座上检测非磁性体圆柱形工件的就位情况时,移动接触工件的触头并通过接近传感器进行检测。
机器人将工件置于临时设置的V形座上,检测到工件。确认就位后,手动将工件转移到下一工序。未检测到工件时,机器人会搬运下一工件。
环境·操作性
固定工件后,移动触头,通过接近传感器使工件就位。
对象工件
圆柱
材质:铝合金
外形:φ100×100mm
重量:2.1kg

目的・动作
在V形工件支座上检测非磁性体圆柱形工件的就位情况时,移动接触工件的触头并通过接近传感器进行检测。
机器人将工件置于临时设置的V形座上,检测到工件。确认就位后,手动将工件转移到下一工序。未检测到工件时,机器人会搬运下一工件。
环境·操作性
固定工件后,移动触头,通过接近传感器使工件就位。
对象工件
圆柱
材质:铝合金
外形:φ100×100mm
重量:2.1kg

29下载254浏览1.68M
16下载390浏览3.3M
81下载350浏览1.06M
31下载181浏览626.04K
21下载221浏览2.97M

14下载334浏览682.17K
79下载265浏览2.85M

79下载264浏览5.19M
79下载321浏览9.5M
99下载451浏览6.89M