文件大小:3.6M
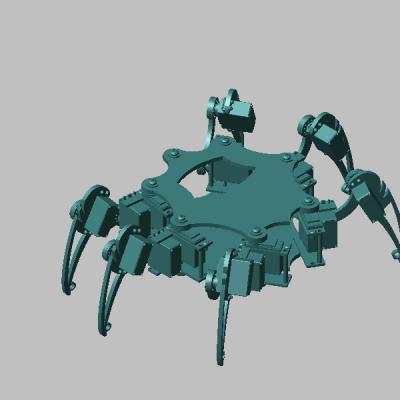
六足机器人SolidWorks模型分享 六足机器人又叫蜘蛛机器人,是多足机器人的一种。仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界昆虫的运动原理。 足是昆虫的运动器官。昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成。基节是足最基部的一节,多粗短。转节常与腿节紧密相连而不活动。

六足机器人SolidWorks模型分享 六足机器人又叫蜘蛛机器人,是多足机器人的一种。仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界昆虫的运动原理。 足是昆虫的运动器官。昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成。基节是足最基部的一节,多粗短。转节常与腿节紧密相连而不活动。
103下载197浏览157.23K
49下载336浏览563.82K
77下载198浏览96.77K

82下载364浏览6.61M
46下载272浏览2.08M

14下载303浏览634.31K

4下载330浏览3.61M

22下载105浏览2.5M
39下载226浏览1.33M
5下载299浏览444.25K