文件大小:62942.5K


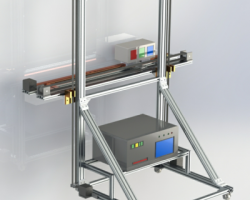
KUKA七轴机器人设备设计,包括渲染文价CATIA文件和渲染文件BIP
七轴机器人设备设计,工业机器人外部轴为轨道,在做机器人仿真必不可少的一种设备,第七轴即为滑动导轨,伺服驱动,,本套图纸压缩格式大小为331MB,比较复杂,电脑需要一定的配置,结构清晰,零部件比较完整,也有一定的复杂性,包括CATIA总装文件,是一套不错的学习和研究的模型

KUKA七轴机器人设备设计,包括渲染文价CATIA文件和渲染文件BIP
七轴机器人设备设计,工业机器人外部轴为轨道,在做机器人仿真必不可少的一种设备,第七轴即为滑动导轨,伺服驱动,,本套图纸压缩格式大小为331MB,比较复杂,电脑需要一定的配置,结构清晰,零部件比较完整,也有一定的复杂性,包括CATIA总装文件,是一套不错的学习和研究的模型
27下载186浏览7715.98K
2下载224浏览2025.81K
25下载376浏览59656.4K
29下载246浏览58341K
38下载501浏览5419.73K

90下载243浏览8877.02K
58下载360浏览5645.93K
84下载217浏览20005.2K

25下载138浏览17859.1K

35下载288浏览16896.1K