文件大小:210469K






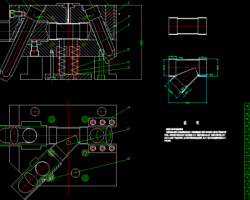
双机器人双夹具弧焊工作站总装设计 包含CATIA建模的零部件和装配图、以及STP文件及BIP渲染图文件。双机器人双夹具弧焊工作站总装设计),两个工作站交叉进行,使机器人焊接时间与工件上、下料时间同步,这种方式可以节约变位器旋转时间。双夹具滑轨形式的焊接机器人系统,可利用两副滑轨轮流为焊接机器人送料,夹具由变位机进行变位来实现机器人焊枪不同位置的焊接。