文件大小:1138.2K





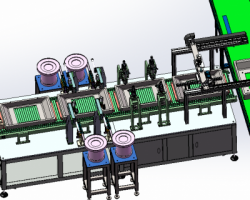
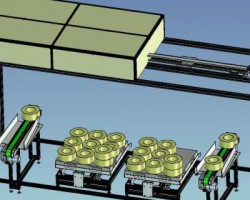
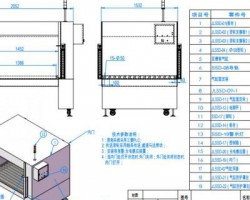
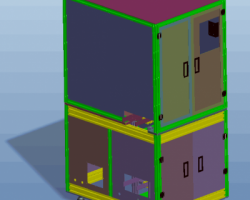
设计一套自动装箱机械手用于自动生产线取代人工装箱工作,以实现成型工序参数的稳定性。利用步进电动机带动手臂进行上下移动和水平垂直旋转,通过气压驱动机械手抓取和松放,能够实现全自动装箱。本次设计的自动装箱机械手由底座、传送机构、臂部升降机构、臂部摆动机构、吸盘等构成。 本次设计首先,通过对自动装箱机械手结构及原理进行分析,在此分析基础上提出了总体结构方案;接着,对主要技术参数进行了计算选择;然后,对各主要零部件进行了设计与校核;最后,通过AutoCAD制图软件绘制了自动装箱机械手装配图及主要零部件图。