文件大小:8137.41K



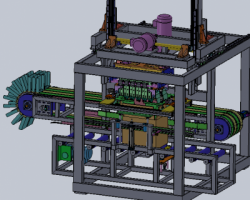
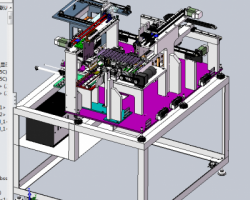
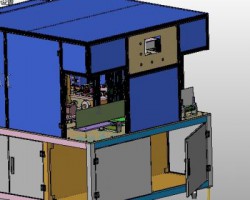
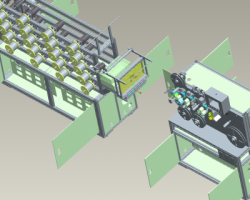
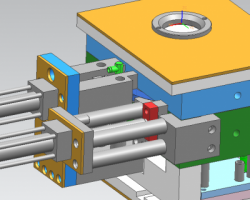
图纸为气动机械手:机械手动作为在初始位置先水平移动,然后向下运动,料爪抓料然后提起,在向后运动松开所抓的物料,详见机构动画,运动精度高可重复性良好。机械手机构伺服电机采用位置利用时间控制配合几个电机位置,电机相互配合实现目标运动。(附STP文件、效果图片、图纸说明)

图纸为气动机械手:机械手动作为在初始位置先水平移动,然后向下运动,料爪抓料然后提起,在向后运动松开所抓的物料,详见机构动画,运动精度高可重复性良好。机械手机构伺服电机采用位置利用时间控制配合几个电机位置,电机相互配合实现目标运动。(附STP文件、效果图片、图纸说明)

12下载251浏览31680.6K
38下载209浏览4215.91K

10下载413浏览7330.73K
100下载227浏览17580.4K
80下载467浏览250.37K
52下载241浏览57827.1K
85下载185浏览71090.9K
76下载376浏览4868.34K
42下载149浏览23723.5K
49下载255浏览1777.18K