文件大小:582.12K
设计要点
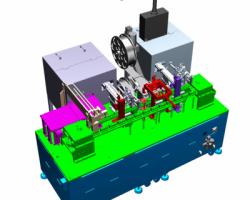
主要零件的计算过程
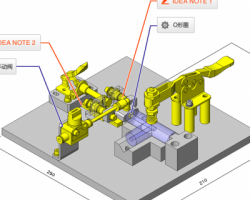
检验单轴机器人的容量是否合适
单轴机器人
单轴机器人搬运重量:0.23[kg]
工件基座:123[g]、工件支架:2[g]×2、盖板:19[g]、治具:8[g]、全套螺栓:36[g]、工件:40[g]
机器人可搬运重量:2[kg]>搬运重量0.23[kg]:OK
单轴机器人力矩
力矩=搬运重量×距离=(0.23×9.8)×0.07=0.16[N・m]
容许转矩:19[N・m]>负荷转矩0.16[N・m]:OK
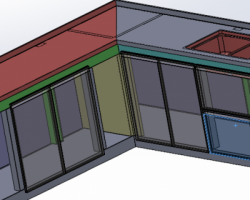
构造制作与设计要点
设置盖板,以确保装置外作业时的滑动部不会出现危险空间
开关传感器处于OFF状态时,控制单轴机器人不能动
不用高价格的区域传感器即能做到可动部位的危险规避