文件大小:418.27K
目的・动作
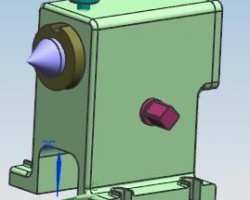
确实保持一定负载的工件。
仅需操作把手即可解除固定。
环境·操作性
基于把手动作的手动机构。
已通过弹簧以与固定方向相反的方向压紧滑块,以防止 偏心 凸轮脱离压紧滑块。
对象工件
电路板
外形:W158×D19×t1.6
特点
规格・尺寸
把手旋转角度:90°
弹簧柱塞负载(1个):2.9~14.7N
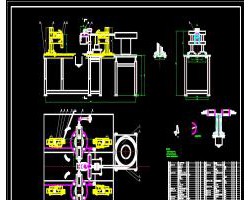
外形尺寸:
W170×D100×H32
精度・负载
・工件固定负载:8.16N
主要零件的选型依据
弹簧
操作力较小,选择弹簧常数较小的类型。
直线导轨
力矩负载较小,因此选择最适合夹具整体规格的类型。
弹簧柱塞
为了切实压紧工件,前端选择扁平型。
确保不会损坏工件的保持力。