文件大小:26M

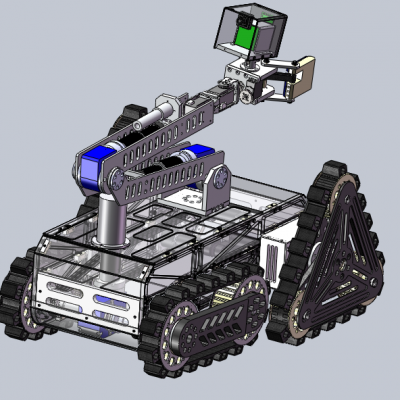
移动救援机器人3D模型 SolidWorks 2014设计 有参数 sldasm﹑sldprt源文件提供,移动救援机器人采用三角履带轮运动机制,实现灵活的流动性。

移动救援机器人3D模型 SolidWorks 2014设计 有参数 sldasm﹑sldprt源文件提供,移动救援机器人采用三角履带轮运动机制,实现灵活的流动性。
4下载336浏览3.1M

96下载345浏览1.31M

58下载193浏览5.17M
5下载217浏览5.25M
74下载224浏览30.3M
60下载224浏览5.16M
33下载333浏览429.6K
21下载222浏览437.24K
22下载307浏览495.93K