文件大小:63.5M
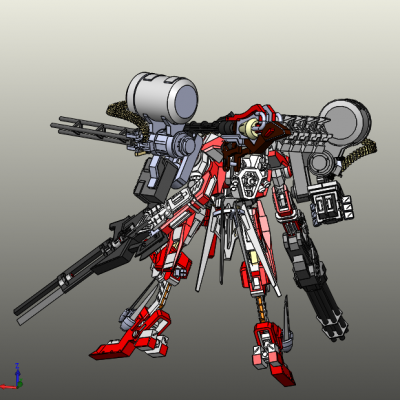
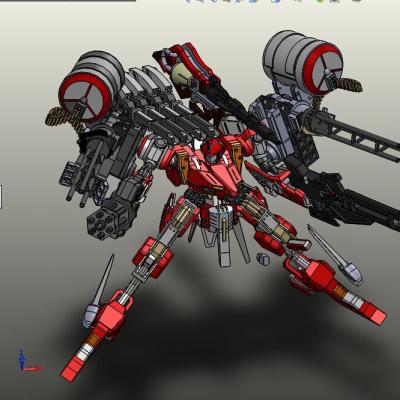
机器人3D模型SW2012设计sldasm﹑sldprt文件提供。机器人本体,其臂部一般采用空间开链连杆机构 机器人高科技产物(18张) ,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。