嵌入式视觉可划分为两个高级类别;感知环境和采取行动。视觉导向的机器人和无人机属于后面的采取行动类。

农业无人机应用示例
嵌入式视觉应用趋势
这些应用,综合起来体现着我们在嵌入式视觉总体环境中观察到的嵌入式视觉当前四大普遍趋势中的三大趋势
1. 边缘 (edge)端通过机器学习获得的智能化 – 智能化嵌入在无人机本身内部,需要从它的摄像头提取信息并根据该信息采取行动,达成自己的目标。
2. 开放式高级语言和框架 – 在无人机中实现智能化需要高级框架和语言。这些中最常用的是开源多平台框架,比如嵌入式环境里的 OpenCV、OpenVX, 以及在机器学习环境里的 Tensor Flow 和 Caffe。
3. 多层次的安全性 – 用于确保无人机不仅能够运行,且不能影响安全性和信息获取。这种方法要求在器件、系统和网络层面实现多层次的安全性。
第四个趋势是嵌入式视觉的普及化。虽然视觉导向的机器人和无人机还不像我们的手机一样普及——我们常在旅行中用手机来翻译标牌等用途,随着新用例被发掘出来,使用视觉导向的机器人和无人机的应用正处于快速发展中。
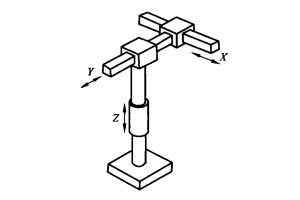
在架构层面无人机拥有一些关键的子系统,包括实时精准的马达控制系统、提供与无人机双向通信的软件无线电和精确的嵌入式视觉系统。视觉导向的机器人和无人机主要针对大部分电池供电的应用,因此设计高能效解决方案的能力极为重要。
全可编程 SoC 满足高精度嵌入式视觉系统需求
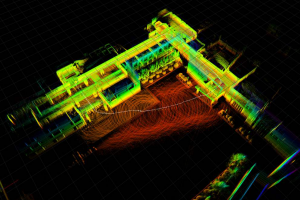
高精度嵌入式视觉系统提供高帧率,其处理图像和根据图像采取行动的能力要远超过人眼。对许多应用来说,需要使用多个摄像头来形成立体多视觉,以完整掌握无人机周边环境。这也称为传感器融合。虽然许多应用使用多摄像头方法来观察环境,部分应用还会把设计用于观测电磁场频谱不同组成部分的摄像头结合起来使用,例如在超光谱或红外应用中的情况。在使用多个相同类型传感器的时候这一般称为同构,在使用不同传感器技术的时候称为异构。